Системная оценка наихудших PDN шумов: целевой импеданс и волны-убийцы. Часть 1
Это было очень ненаучно, но служило отрасли достаточно хорошо для схем с низкой плотностью и низкой скоростью. С усложнением разработок, стала развиваться концепция целевого импеданса [1]. Используя целевой импеданс, разработчики имели количественную и дизайнерскую цель для гарантии того, что переходное напряжение остается в определенных пределах.
Строго говоря, концепция целевого импеданса подходит только для плоских контуров с внутренним сопротивлением; однако, большинство наших практических разработок не имеют такой роскоши. В контурах с неплоским импедансом шум отличается. Удивительно и противоречиво, но сохраняя тот же самый максимальный импеданс, чем больше мы отклоняемся от плоского импеданса, толкая импеданс вниз на определенных частотах, тем выше становится наихудший переходный шум. Это вызывает вопрос, как сделать систематичную разработку и также вызывает спекуляции по поводу волн-убийц [2]. Но существует системный, быстрый и эффективный способ расчета наихудшего шума для любого произвольного контура импеданса.
Концепция целевого импеданса подразумевает, что сеть распределения питания поражается серией скачков тока, каждый скачок тока имеет величину DI и самое быстрое время перехода ttr. Если до BW ширины полосы возбуждения PDN импеданс составляет Ztarget, результирующее переходное напряжение находится в DV пределах.
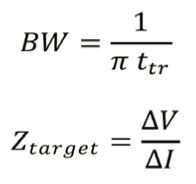
Концепция целевого импеданса и эти выражения предполагают линейный и независящий от времени (LTI) PDN; более того, предполагается, что PDN импеданс плоский, независящий от частоты, от DC до BW ширины полосы возбуждения.
Интересно, что, если профиль импеданса не плоский, но все же остается на или ниже предела Ztarget, наихудший переходный шум становится больше. Для некоторых типичных профилей PDN импеданса, это было показано здесь [3]. Когда профиль импеданса не плоский и наихудший шум отличается от того, что мы могли ожидать от формулы целевого импеданса, нам нужно определить, какова модель возбуждения, дающая наихудший шума, и какова ее величина. Недавно были предложены модифицированные подходы к целевому импедансу (например [4]), или как я уже писал [3], где может быть использован консервативный коэффициент коррекции, основанный на степени не-плоскости метода синтеза импеданса. Использование консервативного коэффициента коррекции с самого начала делает возможным следовать всему прямому процессу разработки без необходимости итераций.
Для LTI PDN с плоским или любым не плоским импедансом, процесс называется метод обратного импульса, и он был опубликован в 2002 [5]. Он обеспечивает гарантированный способ определить абсолютный наихудший переходный шум без необходимости оптимизационной петли, и его соответствующее возбуждение, которое мы можем называть волной-убийцей. Для иллюстрации силы и пользы данного процесса, мы возьмем пример схемы волны-убийцы в [2] и рассчитаем наихудший шум с помощью метода обратного импульса.
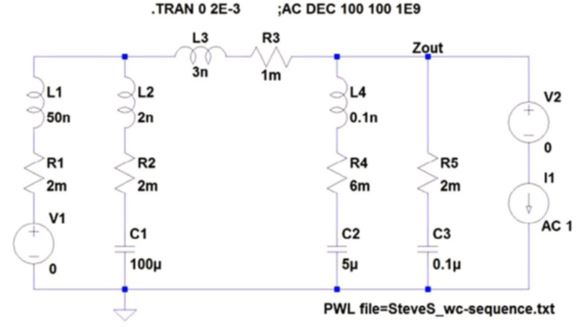
Рис.1 показывает схему из [2], переделанный в свободный симулятор схемы [6]. Обратите внимание, что этот конкретный симулятор обладает способностью представить полную RLC модель единичного компонента, но для ясности схема, показанная здесь, явно вызывает все паразитические элементы, а их собственные паразиты равны нулю. Например, компонент L2, имеющий индуктивность 2nH, не имеет последовательного сопротивления или параллельной емкости. Последовательное сопротивление L2 отдельно вызывается R2 с 2mOhm.
Мы может провести АС симуляцию на этой схеме, чтобы выяснить ее импеданс. Для этой цели мы запустили развертку переменного тока источника тока I1 с величиной тока 1А. Источник напряжения V2 с напряжением равным нулю включен только для удобства, чтобы мы могли также отобразить ток, идущий через нашу схему. Напряжение в результате возбуждения синусоидальной волны с частотой 1А дает нам комплексный импеданс.
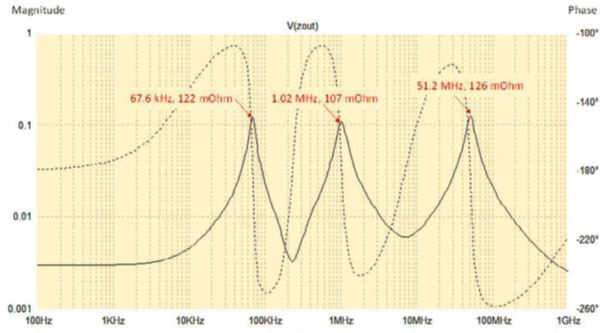
Рис. 2 показывает величину и фазу импеданса в узле Zout в частотном диапазоне от 100Hz до 1GHz. Размах был логарифмическими с 100 частотными точками на десяток.
Источник: PDF pcbd-dec2015