Необходимые навыки от Хэппи Хольдена. Часть 15: Автоматизация производственных процессов. Протоколы автоматизации.
Но когда вы сталкиваетесь с тестированием сборки, вы начинаете понимать настоящие решения по автоматизации. Разница между этими двумя понятиями – это сети и протоколы, которые поставляют информацию и данные. Отрасль, которую мы можем взять за пример: наши братья в производстве полупроводников. Эта отрасль имеет полностью автоматизированные фабрики уже с середины 1980х годов.
ВВЕДЕНИЕ
Эта статья посвящена протоколам автоматизации, которые существуют в настоящее время и некоторым новым, которые только выходят на рынок. В Части 2 я представлю некоторые примеры из моей собственной практики.
Данные, необходимые для производства соединений планирования и машины развивались долгие годы. Ниже указано то, что будет рассмотрено в этой статье:
- Serial RS-232C/RS-485
- Parallel IEEE-488/HP-IB
- MAPS™ протокол
- SECS I & SECII/GEM протоколы
- OML
- IPC-2541
- LAN (IEEE-802.3 и TCP/IP)
- Беспроводное и IoT
Параметры- машина и машина-машина
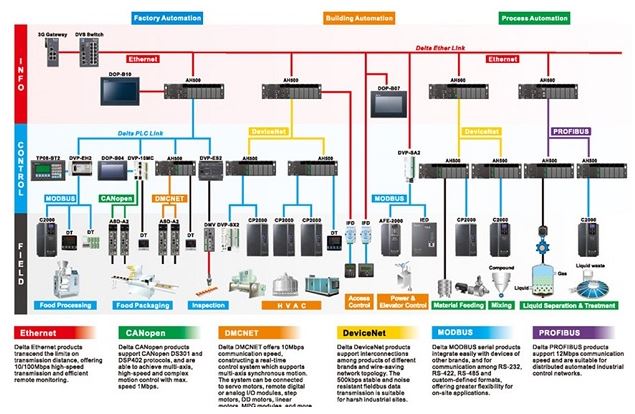
Когда я начал работать с управлением автоматизации в 1970, у нас были данные ASCII в параллельных кабелях. Поэтому мы начали с использования этих протоколов печати и телетайпа для управления машинами. Иногда у нас для работы был только BCD! Теперь у вас есть «автоматизированный завод с выключенным освещением в безлюдную ночную смену» и Промышленность 4.0. Большая часть этого прогресса – это результат применения в автомобильной промышленности программируемых логических контроллеров (ПЛК) и роботов для производства. Рис.1 показывает, что предполагают немецкие специалисты для Промышленности 4.0[1]. Рис.2 показывает 4 уровня иерархии САМ, а Рис.3 изображает типичные сетевые блоки управления заводом.

1. Система управления производством, включая ОЕЕ
a. Информация между оборудованием линий связи и приложениям системы управления производством
b. Отслеживаемость производства
2. Оборудования для тестирования производства
a. Техническое зрение
b. Карты ввода/вывода перемещений
c. Компьютерная платформа
d. Контроллер
3. Мониторинг окружающей среды завода
a. Мониторинг электричества
b. Сточные воды завода
c. Энергоуправление
4. Прогностическая тех. Поддержка
a. Анализ эффективности производства
b. Статус оборудования
c. Диагностика нарушений
d. Сенсорные измерения
5. Автоматизация оборудования
a. Промышленные роботы
b. Автоматически управляемые транспортные средства
c. Промышленное оборудование.
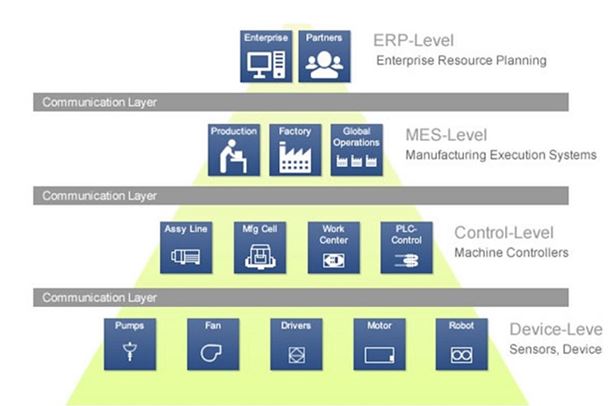
Уровень ERP (Предприятие-Ресурсы-Планирование) – предприятие, партнеры
Слой коммуникации
Уровень MES (Система управления производством) – производство, завод, глобальные операции
Слой коммуникации
Уровень контроля (машинные контроллеры) – Линия сборки, ячейка производства, рабочий центр, ПЛК-контроль
Слой коммуникации
Уровень устройств (сенсоры, устройства) – насосы, фены, драйвера, моторы, роботы.
Мне повезло работать на Hewlett-Packard. Их 2116-модель компьютера (и позднее 2110) были компьютерами с прерыванием в режиме реального времени и были идеальными для контроля оборудования. НР даже разработали CNC систему контроля оборудования, но решили не продавать ее, так как она не подходила к их опыту продаж компьютеров и инструментов. Они продали все системы CNC компании Allen Bradley в Милуоки, Висконсин. Поэтому я пришел к тому, что стал часто работать с АВ, чтобы обратно купить то программное обеспечение, которое разработал НР. Это было счастливым случаем, что АВ познакомил меня с их технологией программируемого логического контроллера (ПЛК). ПЛК стали главным инструментов в управлении оборудованием.
Для программного обеспечения HP также разработал инструменты CAD для разработки печатных плат и механической инженерии. Они имели функции сбора данных, диспетчерского управления и сбора данных (SCADA) и системы тестирования. Компьютерный отдел разработал MRP и ERP программное обеспечение. В 1982 году НР приобрел корпорацию Genesis (IC-10 и шесть других типа PC-10, программные продукты для управления заводом). НР имел полный пакет программного обеспечения для подключения автоматизации производства, который они разработали для GM и MAPSTM . Эта группа по программному обеспечению была выделена в подразделение, поэтому они смогли расширить свою продуктовую линейку и включить в нее системы качества/тестирования/инспектирования, систему управления CNC/оборудованием, программное обеспечение по материалам и систему управления промышленным процессом (по лицензии Mount Isa Mines, добывающей компании в Австралии). Продукты НР были предназначены для сетей автоматизации типичного завода, что показано на Рис.4.
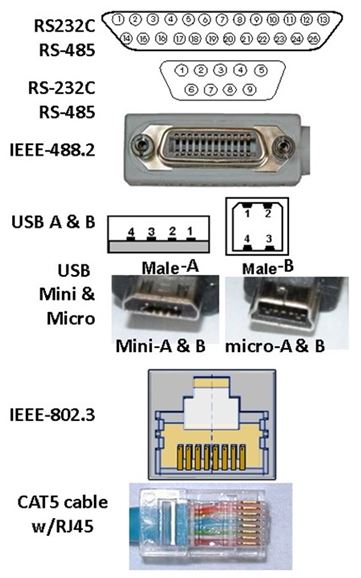
Взаимосоединяемость для машина-машина обычно является одним из или всеми этими стандартами соединений (Рис.5).
Serial RS-232C— обозначает Рекомендованный номер стандарта 232 и С – это позднейшая версия этого стандарта. Серийные порты на большинстве компьютеров используют вариант стандарта RS-232C. Полный RS-232C стандарт определяет 25-выводной "D" коннектор, у которого используются 22 вывода. Большинство из этих выводов не нужны для нормального компьютерного соединения, на самом деле большинство новых компьютеров оборудованы коннекторами типа D с всего лишь девятью выводами.
Стандарт RS-232C ограничивает длину кабеля до 50 футов. Обычно вы можете игнорировать этот стандарт, так как кабель может быть длиной 350 м (1000 футов) при скоростях передачи данных до 19 200, если вы используете высококачественный хорош экранированный кабель. Окружающая среда оказывает большое влияние на длины не экранированных кабелей. В среде с высокими электрическими шумами даже очень короткие кабели могут подбирать паразитные сигналы. Вы можете значительно увеличить длину кабеля с помощью дополнительных устройств, типа оптических вентилей или усилителей сигнала. Оптические вентили используют светодиоды или фотодиоды, чтобы изолировать каждую линию в кабеле, включая заземление сигнала. Любые электрические шумы воздействуют на все линии в оптически изолированном кабеле в равной мере, включая линию заземления. Это приводит к тому, что напряжения на линиях сигнала относительно сигнала земли отражают реальное напряжение сигнала и тем самым отменяют эффект любых шумовых сигналов.
Синхронная и Асинхронная связь [2]
Важные объяснения и детали представлены выдержками из учебника «Введение в последовательную связь» компании TALtech:
Есть два основных типа последовательной коммуникации, синхронная и асинхронная. При синхронной связи два устройства изначально синхронизируются друг с другом и затем постоянно посылают данные, чтобы оставаться в синхронизации. Даже когда данные не были в действительности отправлены, постоянные поток битов позволяет каждому устройству знать, где находится второй в любой момент времени. Те есть каждый отправленный символ либо является актуальными данными, либо пустым символом. Синхронная связь позволяет обмениваться данными с большей скоростью, чем асинхронные методы, так как дополнительные биты для маркировки начала и конца каждого байта данных не требуются. Последовательные порты на компьютерах типа IBM являются асинхронными устройствами, поэтому они поддерживают только асинхронную последовательную коммуникацию.
Асинхронная значит «без синхронизации», и поэтому не требует отправки и получения пустых символов. Однако, начало и конец каждого байта данных должны быть идентифицированы с помощью стартовых и конечных битов. Стартовый бит указывает, когда байт данных начинается, а конечный бит сигнализирует, когда он заканчивается. Требование отправлять эти дополнительные два бита являются причиной того, что асинхронная связь немного более медленная, чем синхронная, однако, она имеет преимущество в том, что процессору не приходится иметь дело с дополнительными пустыми символами.
Асинхронная линия, которая является пустой, определяется оценкой 1 (также называемой маркированным состоянием). Используя эту оценку для указания на то, что в настоящий момент никакие данные не отправляются, устройства могут «видеть» различия между холостым состояние и разъединением в линии. Когда символ должен быть передан, отправляется стартовый бит. Стартовый бит имеет оценку 0 (также называемый нулевым состоянием). Поэтому, когда линия переключается с оценки 1 на оценку 0, ресивер получает сигнал, что данные сейчас пойдут по линии.
RS-422 и RS-485 являются высокоскоростными последовательными протоколами, которые могут достигать 10 Mbps до 20 метро или до 1500 метров, но при 100 Kbps.
Parallel IEEE-488— спецификация 8-битной параллельной мульти-функциональной шины интерфейса цифровой связи малой дальности. IEEE-488 был создан из продукта HP-IB (Hewlett-Packard шина интерфейса), который обычно называют GPIB (шина интерфейса общего назначения). Хотя впервые он была создан в поздние 1960е для соединения между собой автоматизированного тестового оборудования Hewlett-Packard, этот продукт так же имел определенный успех в 1970-е и 80е годы в качестве периферийной шины для ранних миникомпьютеров, в частности Commodore PET. Более новые стандарты в основном заменили IEEE-488 в компьютерном использовании, но до сих пор этот стандарт используется в сфере тестового оборудования.
В 1987, IEEE представил Коды, форматы, протоколы и общие команды Стандарта IEEE-488.2[3]. Он был обновлен в 1992. IEEE-488.2 предоставил обмен базовыми протоколами и форматами, также как и команды, независимые от устройства, структуры данных и протоколы ошибок. IEEE-488.2 был построен на базе IEEE-488.1, но не заменял его. Оборудование может соответствовать более простому IEEE-488.1 без следования IEEE-488.2.
Википедия дает следующее определение IEEE-488[4]: “Пока IEEE-488.1 определял аппаратное обеспечение и IEEE-488.2 определял протокол, не было стандарта для команд, специфичных для инструмента. Команды для управления одним и тем же классом инструментов (например, мультиметрами) варьировались между производителями и даже моделями. Военно-воздушные силы США, а за ними и Hewlett-Packard, осознали эту проблему. В 1989 НР разработал свой язык TML, который стал предшественником SCPI – Служебные команды для программируемых приборов. SCPI был представлен как стандарт отрасли в 1990. SCPI добавил стандартные родовые команды и серии классов инструментов с соответствующими командами, специфическими для класса. SCPI предписывал IEEE-488.2 синтаксис, но допускал другой физический транспорт (не-IEEE-488.1).”
Сайт стандартов IEEE сообщает[3]: “В 2004, IEEE и IEC соединили их соответственные стандарты в двойное название IEEE/IEC стандарт IEC-60488-1, Стандарт для протокола высокой эффективности для Стандартного цифрового интерфейса для программируемых приборов – Часть 1: Основы, заменяющая IEC-60488-2, и Часть 2: коды, форматы, протоколы и общие команды, заменяющая IEEE-488.2/IEC-60625-2.”
Протокол MAPS™—Автоматизация сообщения & Моделирование протокола (MAPS™)[5]
Объяснение из обзора учебника GL Communications Inc.:
MAPS определяет набор стандартных коммуникационных сервисов для автоматизации завода и был принят в качестве международного стандарта ISO. Это моделирование протокола и инструмент тестирования на соответствие conformance test tool, которое поддерживает различные протоколы для таких контроллеров заводка как ПЛК, роботы, групповые контроллеры и контроллеры кластера. MAPS – один из наиболее старых и наиболее используемых в автоматизации заводов протоколов, впервые введенный компанией General Motors и принятый также компанией General Electric для своих заводов. MAPS базируется на эталонной модели для OSI (открытые системы межсоединения) международной организации стандартизации (ISO). У него есть три основных компонента: функции передачи файла, доступа и управления, функции спецификации производственных сообщений и функция X.500. Такие протоколы как SIP, MEGACO, MGCP, SS7, ISDN, GSM, MAP, CAS, LTE, UMTS, SS7 SIGTRAN, ISDN SIGTRAN, SIP I, GSM AoIP, Diameter и другие. Этот инструмент автоматизации сообщений объединяет решения как для протокола моделирования, так и для протокола анализа. Применение включает различные планы тестирования и примеры тестирования для поддержи тестирования объектов в реальном времени. Вместе с возможностью автоматизации, приложение дает пользователю неограниченную возможность редактирования сообщений и контроля сценариев (последовательности сообщений). «Последовательность сообщений» генерируется через скрипты.
MAPS™ разработан для работы на TDM интерфейсах или же на IP/Ethernet интерфейсах. MAPS™ также поддерживает 3G & 4G мобильные протоколы для тестирования стремительно развивающихся мобильных технологий. MAPS™ может моделировать радио сигнальные протоколы, такие как LTE (S1, eGTP, X2) интерфейсы и UMTS (IuCS, IuPS, IuH), GPRG Gb, и GSM A через слой IP транспорта.
MAPS™ механизм тестирования усилен для моделирования множественных UEs и IMS основных элементов, таких как P-CSCF, I-CSCF, S-CSCF, PCRF, MGCF в IMS сети. С помощью мобильных телефонов и других беспроводных сетей VoLTE Lab может работать в реальном времени для выполнения VoLTE звонков, а также для внутренней работы с PSTN и VoIP сетями. MAPS™ усовершенствован до версии высокой плотности и специальных целей применения 1U сетей, что позволяет высокую интенсивность звонков (сотни звонков/сек) и высокий объем звонков (десятки тысяч одновременных звонков/1U платформу).
Очень хорошее описание MAPS и его работы доступно в статьях в HP Journal за Август 1990.
Источник: pcb.iconnect007.com
